KMO 수학경시 정수론은 2007년 6월 10일 처음 출간 되었습니다. 수학경시 정수론은 2011년 10월 1일 증보 개정판을 발행하였고 2020년 12월 개정판은 최근까지 KMO에 출제된 기출문제와 타 경시대회 문제들을 분석하여 다시 한번 KMO대비에 최적화된 교재로 발간되었습니다. KMO 또는 과고, 영재고 준비를 하는 학생들에게 훌륭한 정수론 공부 안내서라 생각합니다.
임장환
다비드 힐베르트(David Hilbert)계 수학자참고:Mathematics Genealogy ProjectDr.임장환 영재수학 연구소 소장 독일 Trier, Kiel 대학에서 수학독일 Kiel대학 수학과 졸업(박사) 독일 Kiel 대학 연구원 (기하학 및 Computer Vision 연구)(전)중앙대학교 첨단영상대학원 연구교수(현)facebook Spatial AI KR 그룹 (수학전문위원)전공: 사영기하학(Projective Geometry), 위상기하학(Topological Geometry)관심분야: Lie-group 3D Reconstruction From Multiple Images Kalman Filter, Stochastic Differential Equation
6. 합동식(Congruence)과 나머지(Residue), 윌슨의 정리 6.1 합동식의 정의와 연산법칙(Modular Arithmetic) 6.2 자연수의 거듭제곱과 거듭제곱의 일의자릿수 6.3 완전제곱수 6.4 완전 나머지 체계와 표준 완전 나머지 체계 6.5 Wilson Theorem (윌슨의 정리)
7. 페르마의 작은 정리와 오일러 정리 7.1 페르마의 작은정리(Fermats Little Theorem) 7.2 오일러 정리: 페르마의 작은정리에 대한 오일러의 일반화
8. 부정방정식(Diophantine Equation)의 해법 8.1 선형 부정방정식 8.2 부정 방정식의 특수해 구하는 방법 8.3 부정 방정식의 인수분해 해법 8.4 표현방법해석을 통한 부정방정식 해법 8.5 다양한 부정방정식 해법
9. 선형합동식과 중국인의 나머지 정리 9.1 선형 합동식(Linear Congruences) 9.2 중국인의 나머지 정리 (Chinese Remainder Theorem)
번호
제목
작성자
등록일
조회수
등록된 문의가없습니다.
반품/교환 방법
Q&A게시판, 고객센터(02-851-8182)
반품/교환 가능기간
수령후 1주일 이내의 상품
반품/교환 비용
· 고의 단순변심 및 착오구매일 경우 상품 배송비는 고객 부담함 · 위 사항 이외의 문제에 대해서는 당사에서 배송비 부담 · 발생하는 비용처리는 주문자와 당사간에 협의 후 정함
반품/교환 불가사유
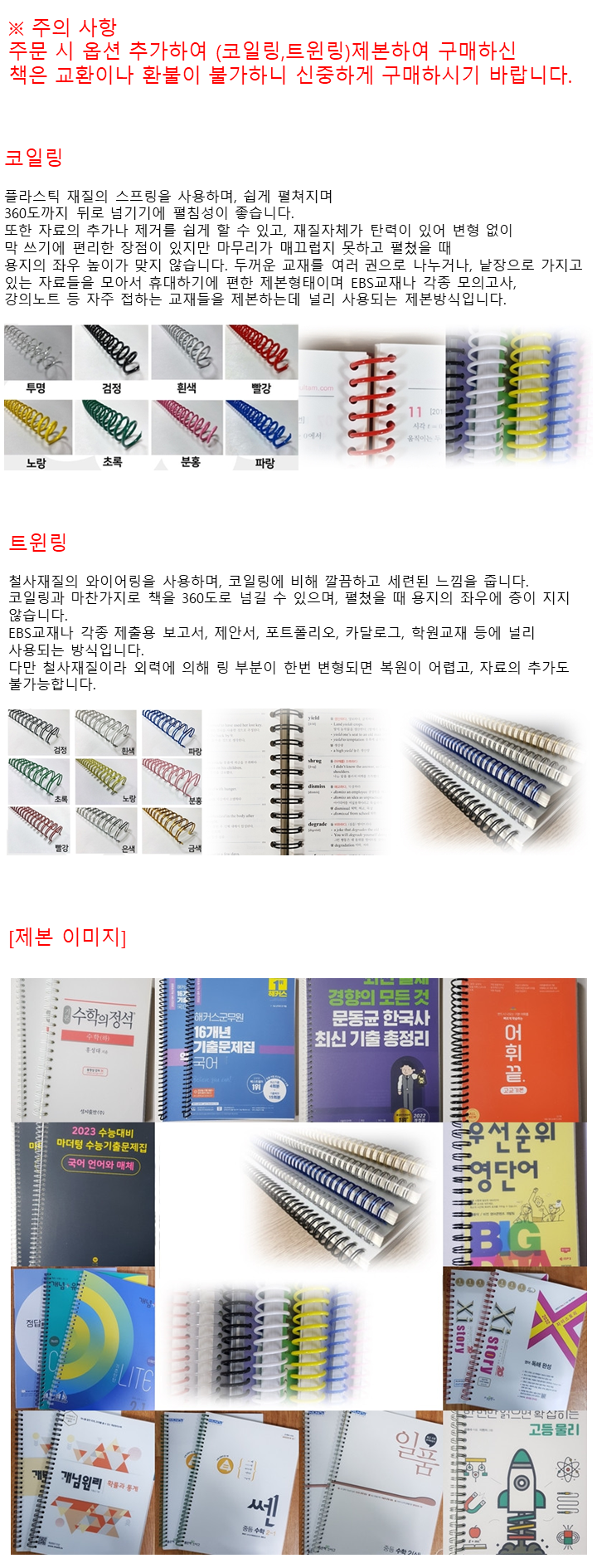
· 출력인쇄제본하여 작업된 상품 · 코일링/트윈링으로 옵션처리된 상품 · 소비자의 요청에 따라 개별적으로 주문 제작되는 상품 · 책에 오염/사용감/이상이 생겼을 경우